

Industrial Robotics
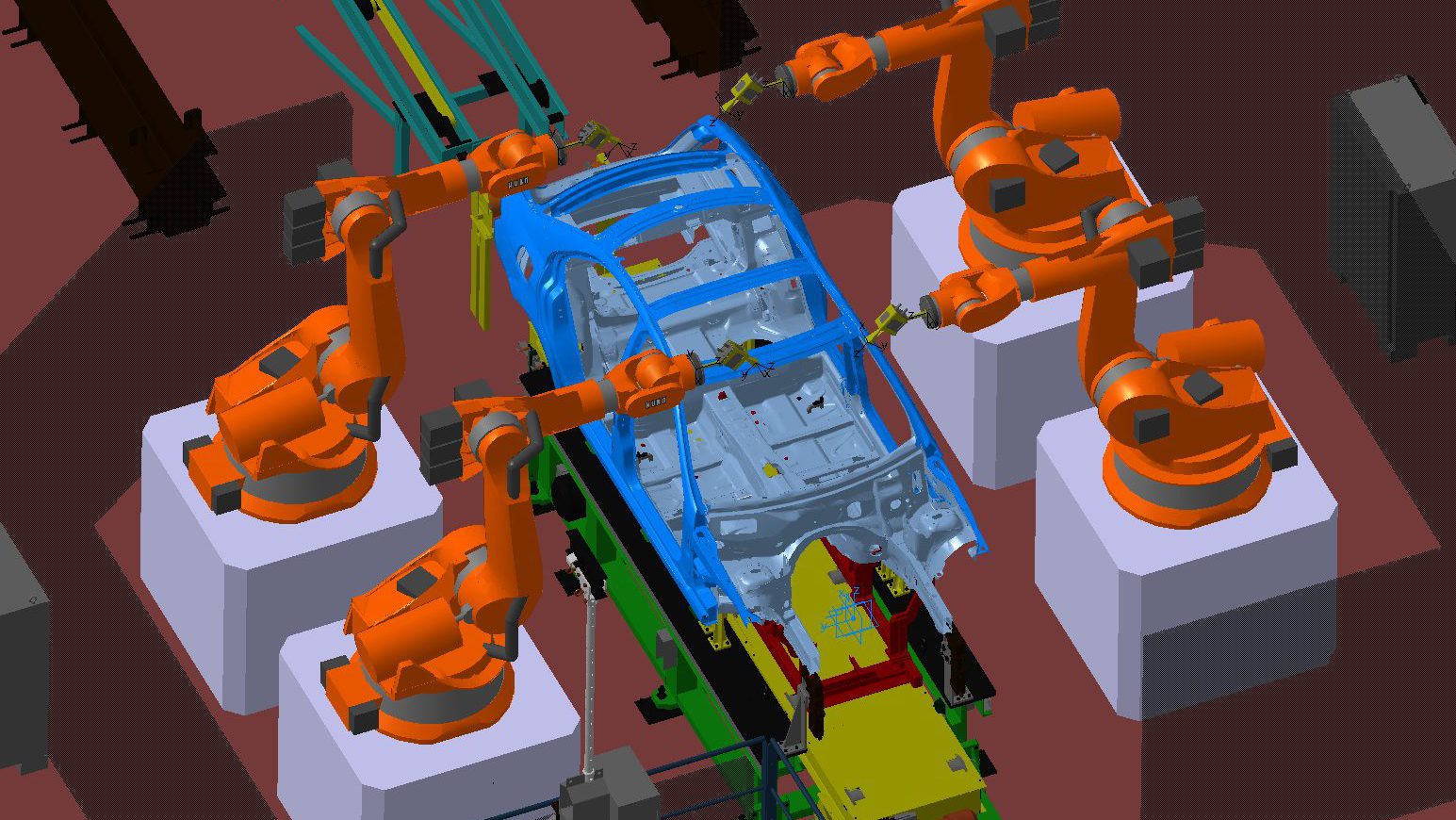
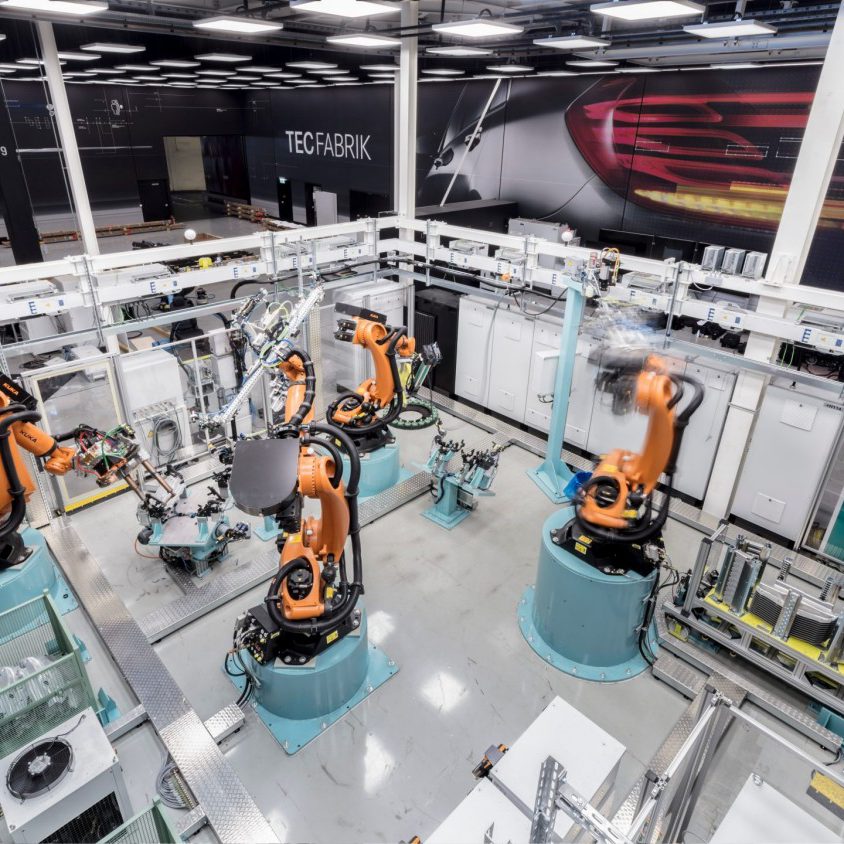
Definition of novel engineering methods and tools for improving the performance and applications of industrial robotics, exploiting the potential of Virtual Prototyping and Digital Twin approaches. Detailed and interdisciplinary multi-domain models enable the emulation of the physical processes allowing real-time optimization of the final robotic manufacturing manufacturing quality, cost-effectiveness and productivity
Projects

Related publications
Ferrarini, S., Bilancia, P., Raffaeli, R., Peruzzini, M., Pellicciari, M. (2024) A method for the assessment and compensation of positioning errors in industrial robots,
Robotics and Computer-Integrated Manufacturing, Vol.85, 102622
Bilancia, P., Locatelli, A., Tutarini, A., Mucciarini, M., Iori, M., & Pellicciari, M. (2025). Online motion accuracy compensation of industrial servomechanisms using machine learning approaches. Robotics and Computer-Integrated Manufacturing, 91, 102838.
Bilancia, P., Ferrarini, S., Berni, R., & Pellicciari, M. (2024) Assessing path accuracy in industrial robots via ballbar technology, Industrial Robot.
Bilancia, P., Monari, L., Raffaeli, R., Peruzzini & M., Pellicciari, M. (2022) Accurate Transmission Performance Evaluation of Servo-Mechanisms for Robots, Robotics and Computer-Integrated Manufacturing, Vol. 78, 102400
Bilancia, P. Schmidt, J., Raffaeli, R., Peruzzini, M., Pellicciari, M. (2023) An Overview of Industrial Robots Control and Programming Approaches, Applied Sciences, Vol. 13(4), 5282
Gadaleta, M., Berselli, G., Pellicciari, M., & Grassia, F. (2021) Extensive experimental investigation for the optimization of the energy consumption of a high payload industrial robot with open research dataset, Robotics and Computer-Integrated Manufacturing, Vol. 68, 102046.
Gadaleta, M., Pellicciari, M., & Berselli, G. (2019). Optimization of the energy consumption of industrial robots for automatic code generation. Robotics and Computer-Integrated Manufacturing, 57, 452-464.